Reverse Eng’ing PALs
HOPE Computer
A501 DRAM Card
Modifying C920
Amiga floppy blog pages
Download
Project Goals
Search
Reverse Eng’ing PALs
HOPE Computer
A501 DRAM Card
Modifying C920
Amiga floppy blog pages
Download
Project Goals
Search
Search
Tag - commodore
Commodore Amiga Related
On building an A500++
5 comments
Commodore Amiga Related
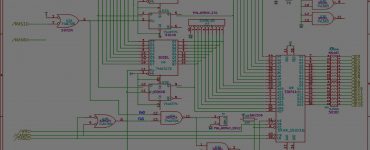
Expansion Systems DataFlyer Plus 2.1
30 comments
Amiga Floppy
Inactive
re-examining XOR data checksum used on amiga floppies
5 comments
Amiga Floppy
logic analyzer on Amiga 500 Paula chip
3 comments
Amiga Floppy
how the amiga reads floppies
3 comments
Amiga Floppy
MFMSanityCheck
Add comment
Amiga Floppy
new book
Add comment
Amiga Floppy
too many variables
Add comment
Reverse Eng’ing PALs
HOPE Computer
A501 DRAM Card
Modifying C920
Amiga floppy blog pages
Download
Project Goals