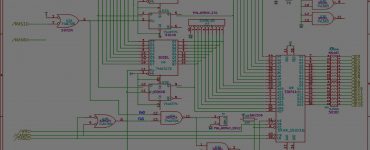
Reverse Eng’ing PALs
HOPE Computer
A501 DRAM Card
Modifying C920
Amiga floppy blog pages
Download
Project Goals
Search
Reverse Eng’ing PALs
HOPE Computer
A501 DRAM Card
Modifying C920
Amiga floppy blog pages
Download
Project Goals
Search
Search
Category - Badge Computer
Badge Computer
Circle of HOPE 2018 presentation on HomeBrew 68K retro-computing
2 comments
Badge Computer
Fixed point number formats: might use 16.16
4 comments
Badge Computer
3D Wireframe Rotation dreams…
4 comments
Badge Computer
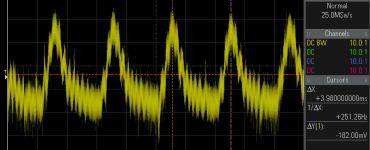
Adding Yamaha YM2612 support has begun
Add comment
Badge Computer
Updated hope badge computer
Add comment
Badge Computer
Watching YM2612 communication on Sega Genesis
Add comment
Badge Computer
Learning the YM2612 with a Sega Genesis Model 1
1 comment
Badge Computer
Performance of the Hope Badge Computer
4 comments
Badge Computer
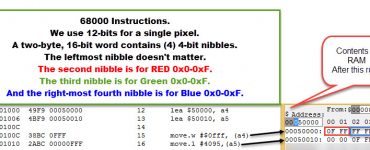
move.w vs move.l: The culprit of my circle problems
2 comments
Badge Computer
Graphics Primitives are working, at least mostly.
Add comment
Load More
Reverse Eng’ing PALs
HOPE Computer
A501 DRAM Card
Modifying C920
Amiga floppy blog pages
Download
Project Goals